[아두이노#420] A4988드라이버를 이용해서 nema17 스탭모터를 nRF24L01로 제어해보기!(녹칸다/포로리야공대가자)
프로그래밍/A4988과 NEMA17 2022. 1. 20. 22:48
A4988드라이버를 이용해서 nema17 스탭모터를 nRF24L01로 제어해보기!
녹칸다의 a4988를 이용한 스탭모터 제어 시리즈이다!
이번편은 무선통신 모듈인 nRF24L01모듈을 이용해서 스탭모터를 원격제어하는 예제를 만들어보도록 한다!
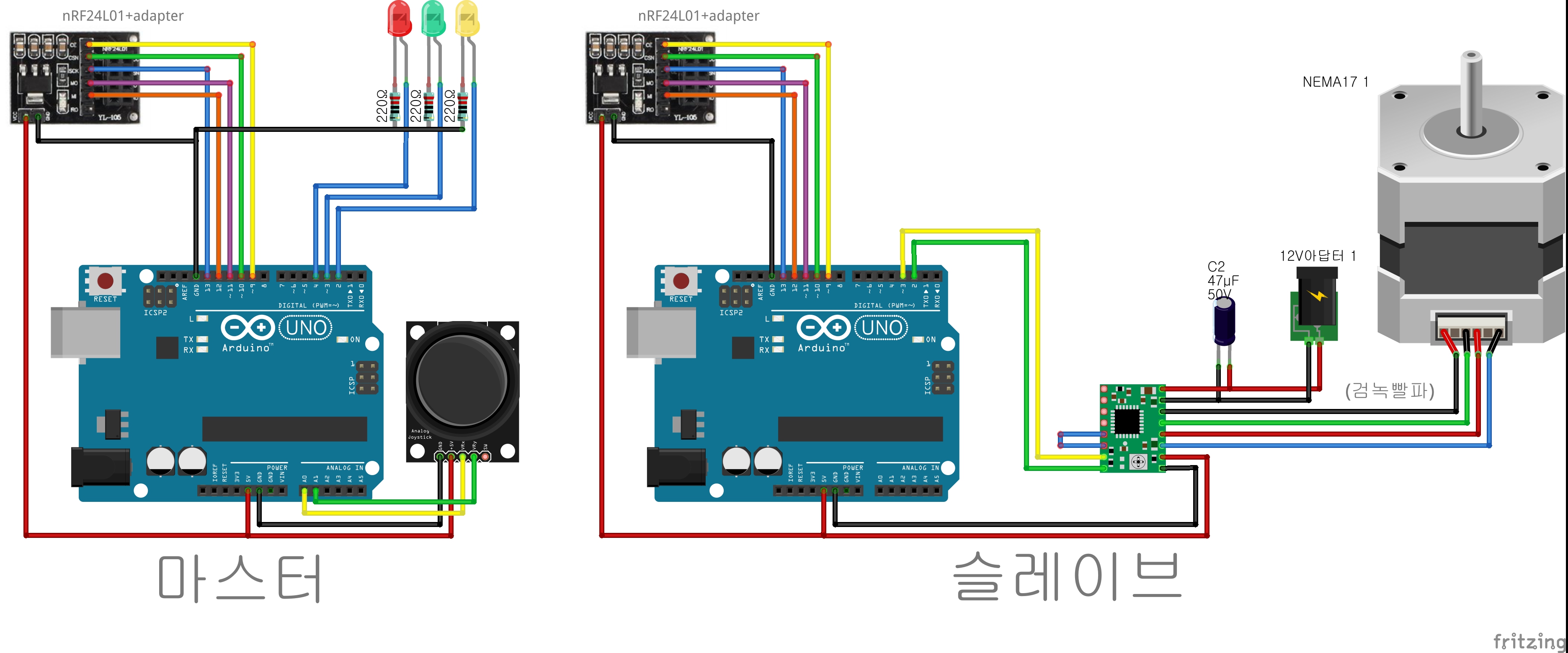
아두이노 2대를 준비해서 각각 RF24모듈을 연결해서 1:1 무선통신이 되도록 한다!
그리고 한쪽에는 컨트롤러로 구성하고 다른 한쪽에 스탭모터를 연결해서 제어해보도록 하자!
아래와 같은 순서로 접근해보도록 하자!
1.컨트롤러에 버튼 2개와 가변저항을 연결해서 스탭모터의 회전방향과 속도를 원격제어 해보기!
2.컨트롤러에 2축 조이스틱을 연결해서 스탭모터의 회전방향과 속도를 원격제어 해보기!
3.컨트롤러에 버튼 2개를 연결하고 누르면 스탭모터에 가속도가 적용이 되면서 정해진 회전을 수행하도록 해보시오!
(기타 필요한거 해보기!)
(실제로한거)
1.컨트롤러보드에서 버튼1번을 누르면 원격지에있는 스탭모터가 고정된속도로 시계방향으로 회전한다! 2번버튼을 누르면 고정된 속도로 반시계방향으로 회전한다! 3번버튼을 누르면 멈춘다!+원격지에있는 스탭모터가 어떻게 돌아가는지 LED로 표현하시오!

2.조이스틱을 이용해서 (1)예제가 돌아가도록 하시오!

3.(2)예제에서 조이스틱의 y축을 이용해서 속도제어를 해보시오!
4.조이스틱을 오른쪽으로하면 시계방향으로 속도가 점진적으로 증가하고 왼쪽으로하면 반시계방향으로 증가하도록하되 조이스틱을 가운데두면 멈추도록 하시오!
(420-3과 회로도동일함)
5.버튼 3개를 연결한다음 1번버튼을 누르면 원격지에있는 스탭모터의 각도가 90도회전했다가 원위치로 다시 돌아오도록하고, 2번버튼을 누르면 180도만큼 이동했다가 원위치로 돌아오고, 3번버튼을 누르면 270도만큼 회전했다가 돌아오도록 하시오!(스탭모터가 회전을 시작하면 1번LED를 켜고, 회전이 종료되면 2번LED를 켜시오)

6.버튼2개를 연결하고 1번버튼을 누르면 시계방향으로 스탭모터를 가감속제어하고 2번버튼을 누르면 반시계방향으로 가감속할 수 있도록하시오! 컨트롤러에 FND모듈을 하나 연결하고 원격지에있는 스탭모터의 현재위치를 받아와서 출력하시오!

(nrf24l01양방향1:1통신/#254)
https://bota.tistory.com/1588
관련라이브러리(nRF24L01/1.3.12)
https://nrf24.github.io/RF24/
관련라이브러리(AccelStepper/1.61.0)
http://www.airspayce.com/mikem/arduino/AccelStepper/
관련라이브러리(TM1637/1.2.0)
https://github.com/avishorp/TM1637













