[아두이노#422] nRF24L01모듈로 nema17 스탭모터 2개를 동시에 원격제어하는 방법!(녹칸다/포로리야공대가자)
프로그래밍/A4988과 NEMA17 2022. 1. 25. 23:23
nRF24L01모듈로 nema17 스탭모터 2개를 동시에 원격제어하는 방법!
녹칸다의 a4988를 이용한 스탭모터 제어 시리즈이다!
이번편에서는 무선통신 모듈인 nRF24L01을 1번 아두이노에 연결하고 스탭모터를 2번 아두이노에 연결해서 원격제어해보는 예제를 만들어보도록하자!
전반적으로 스탭모터를 바퀴로하는 RC카를 시뮬레이션해서 제어해보도록 하자!
1.시리얼 입력으로 지정된 개별/일괄 각도로 이동시키기
2.버튼을 눌렀을때 지정된 개별/일괄 각도로 이동시키기
3.버튼을 이용해서 스탭모터 2개를 바퀴처럼 활용해보기(속도, 전진, 후진 등등)
4.조이스틱을 이용해서 스탭모터 2개를 바퀴처럼 활용해보기(속도, 전진, 후진 등등)
(실제로한거)
1.마스터의 시리얼모니터에서 유저가 1,2,3,4중에 하나를 입력했을때 입력결과를 슬레이브쪽으로 전송해서 241-5예제와 동일하게 원격제어하되 슬레이브쪽 제어결과를 마스터쪽이 알도록 양방향 통신을 하시오!

2.마스터쪽에 버튼 4개를 연결하고 LED2개를 연결한다! 버튼1,2,3,4순서로 (1)예제에 4가지 제어기능을 매핑하고 명령이 들어갔을때 1번LED를 켜고 제어가 완료된 메시지를 수신했을때 2번LED를 켤수 있도록하시오!

3.(2)예제에서 마스터쪽에서 슬레이브가 어떤 명령을 수행했는지 결과를 FND모듈(TM1637)로 표현해보시오!
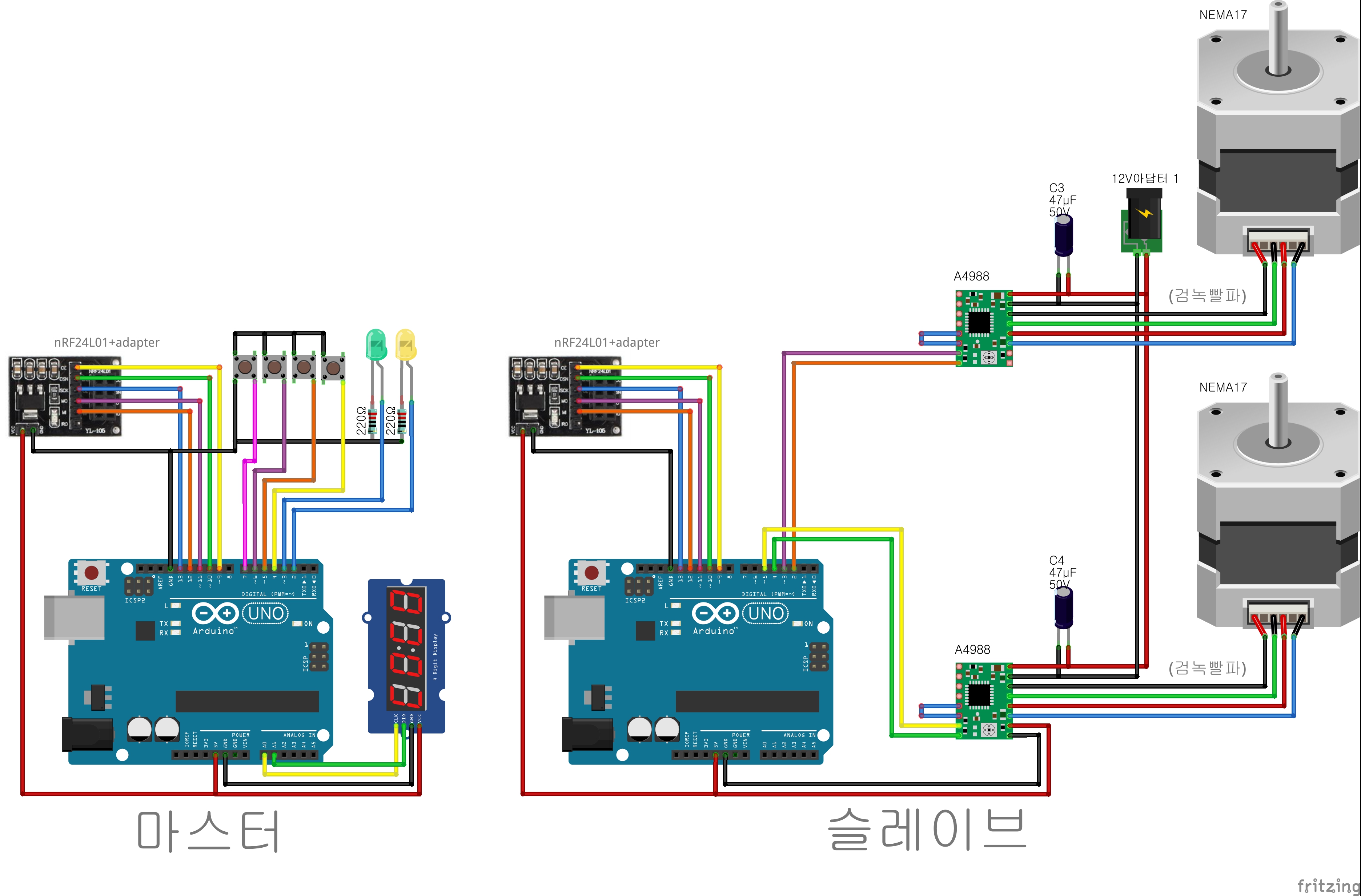
4.마스터에 버튼2개를 연결하고 1번버튼을 누르면 스탭모터 2개가 전진하고 2번버튼을 누르면 후진하도록 하시오!(스탭1이 CW,스탭2가 CCW일때 전진으로 가정함)

5.(4)예제에서 버튼을 누르고 있는 동안에만 전진하거나 후진하도록 해보시오!

6.(5)예제에서 가변저항을 마스터에 하나달고 속도제어를 하시오!
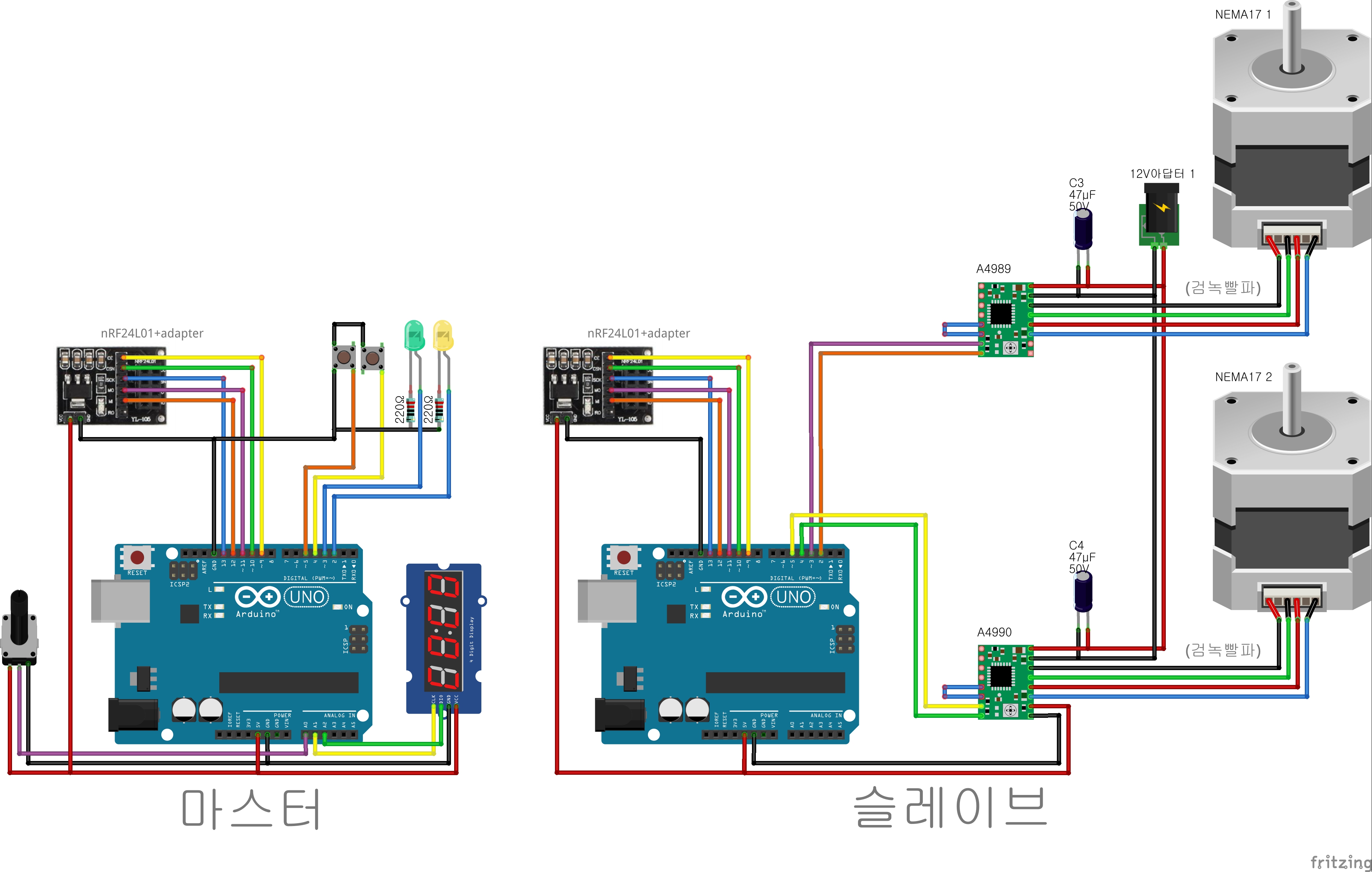
7.마스터에 조이스틱을 연결하고 레버를 오른쪽으로 제끼면 전진, 왼쪽으로 제끼면 후진으로하되 가감속을 붙혀서 회전하도록 하시오! 현재 속도를 받아서 FND모듈에 출력하시오!

관련라이브러리(nRF24L01/1.3.12)
https://nrf24.github.io/RF24/
관련라이브러리(AccelStepper/1.61.0)
http://www.airspayce.com/mikem/arduino/AccelStepper/












