[아두이노#358] (tcp/udp #11) IoT보드(wemos d1r1) 끼리 TCP통신으로 제어해보기2(양방향)!(녹칸다/포로리야공대가자)
프로그래밍/TCP&UDP 2021. 10. 7. 00:06
(tcp/udp #11) IoT보드(wemos d1r1) 끼리 TCP통신으로 제어해보기2(양방향)!
녹칸다의 TCP, UDP통신을 위한 시리즈이다!
이번편은 9편에서 구현한 노드레드(node-red)서버를 이용해서 사물인터넷보드(wemos d1r1) 2대의 보드간 제어를 목적으로 한다!
클라이언트가 클라이언트를 제어하는 것이다! (서버를 통해 전달 받은 데이터로~)
아래와 같은 내용으로 여러가지 쓸만한 예제를 구현해보도록 하자!
보드 2개를 각각 A와 B라고 하자!
(공통) 서버와 접속상태를 LED로 표현하시오!
1. A에 버튼 2개와 LED2개를 연결하고 B에 버튼 2개와 LED 2개를 연결한다음 A의 버튼으로 B의 LED를 제어하는 한편! B의 LED상태를 A가 받아서 동일하게 점멸되도록 하시오!(B에 연결된 버튼은 자기자신의 LED를 제어한다)
2. A에 버튼 2개와 LED 2개를 연결하고 B에 버튼2개와 릴레이를 연결한다음 A가 버튼을 눌렀을때 B에 연결된 DC모터가 제어되는 한편! DC모터의 작동상태를 A에 달린 LED로 표현하시오!(B에 연결된 버튼은 자기자신의 릴레이를 제어한다)
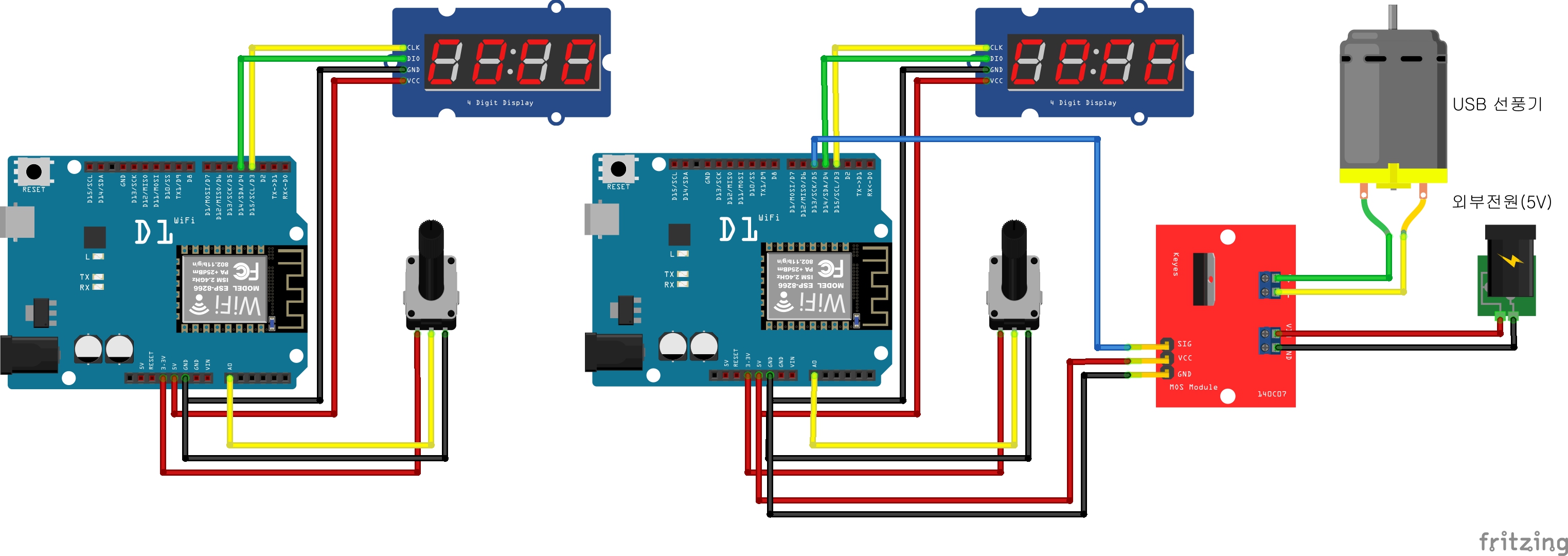
3. A에 가변저항과 FND모듈(TM1637)을 연결하고 B에 가변저항과 모스펫(irf520)을 연결하고 A가 가변저항을 돌렸을떄 B에 연결된 DC모터의 속도가 제어되는 한편! B에 설정되어있는 값을 A의 FND모듈에 출력되도록 하시오!(B에 연결된 가변저항은 자기자신의 모스펫을을 제어한다)
4. A에 가변저항과 FND모듈(TM1637)을 연결하고 B에 가변저항과 서보모터를 연결하고 A가 가변저항을 돌렸을때 B에 연결된 서보모터 각도가 제어되는 한편! B의 서보모터 각도를 A의 FND모듈에 출력되도록 하시오!(B에 연결된 가변저항은 자기자신의 서보모터를 제어한다)
(시간이 남으면 하고 싶은거 하기+온도와 부저 예제?)