[아두이노#127] CAN통신모듈(MCP2515/6편) 1:N통신으로 스탭모터 제어해보기(녹칸다/포로리야공대가자)
프로그래밍/CAN통신(MCP2515) 2020. 10. 29. 20:32
회로도준비중
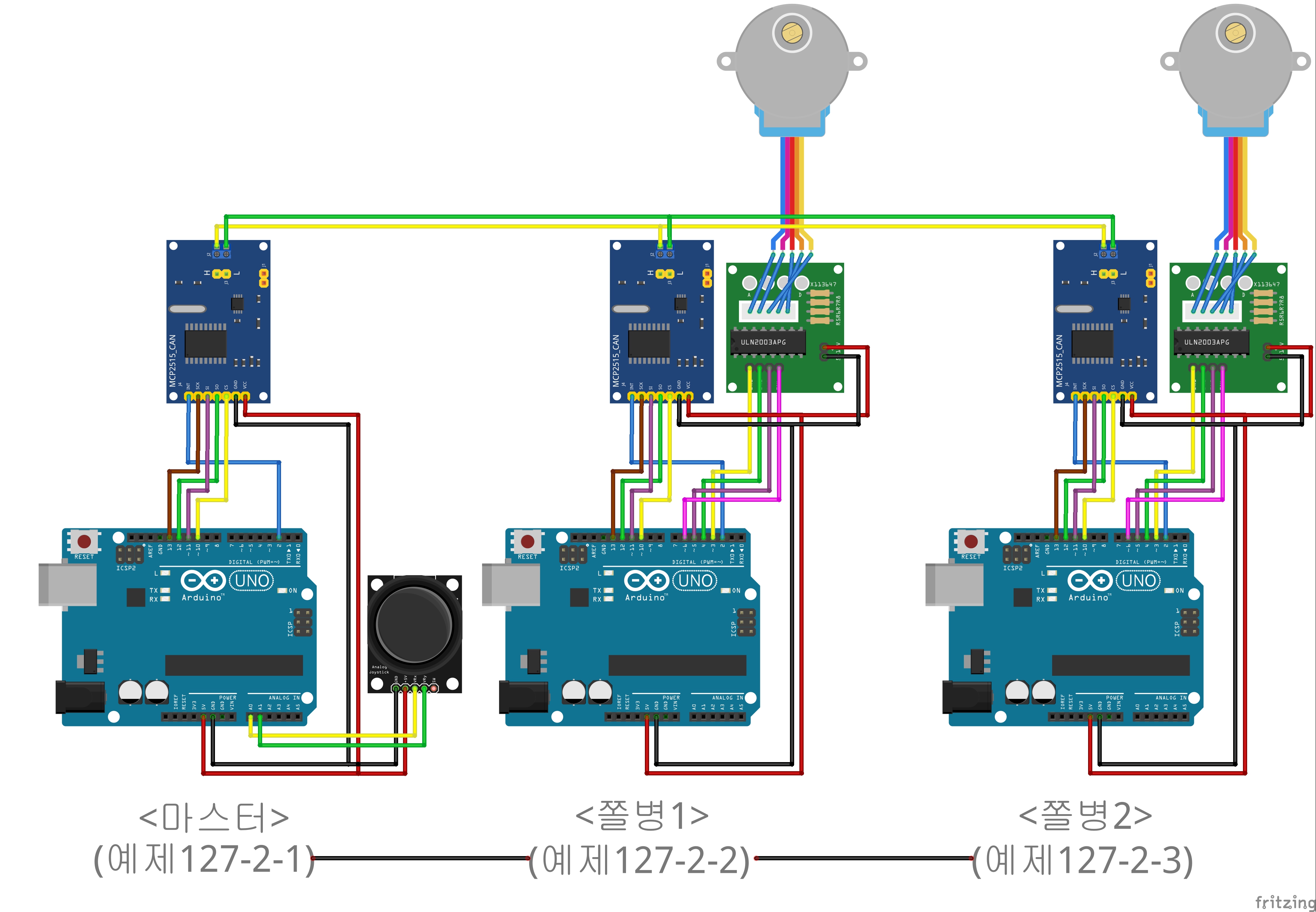
(CAN통신모듈(MCP2515/6편) 1:N통신으로 스탭모터 제어해보기)
마스터 아두이노 1대와 슬레이브 아두이노 2대로 1:1 연결!
슬레이브2대에 각각 스탭모터를 하나씩 달아보자!
(예제1)마스터에서 날린 값에 따라서 스태핑모터가 회전되도록 해보자!
(예제2)마스터에 달린 2축 조이스틱에서 x축방향으로 제어하면 슬레이브1번의 스탭모터가 작동하고 y축방향으로 제어하면 슬레이브2번의 스탭모터가 작동되도록 해보자!
예제127-1-1 (마스터코드)
* 슬레이브에 각각 스탭모터가 1개씩 장착되어있다
* 마스터가 슬레이브에 장착된 스탭모터를 각각 제어할 수 있도록 해보자
* (예시)
* [command id] 0x00(양의방향) [스탭값1] [스탭값2] [나머지4개바이트는 사용안함]
* [command id] 0x01(음의방향) [스탭값1] [스탭값2] [나머지4개바이트는 사용안함]
* (스탭모터) 총2048스탭.. 최소스탭이 32스탭
* 2048이 360도에 해당됨.. 32스탭이 5도정도 됨..

예제127-2-1 (마스터코드)
* 슬레이브에 각각 스탭모터가 1개씩 장착되어있다
* 마스터가 슬레이브에 장착된 스탭모터를 각각 제어할 수 있도록 해보자
* (예시)
* [command id] 0x00(양의방향) [스탭값1] [스탭값2] [나머지4개바이트는 사용안함]
* [command id] 0x01(음의방향) [스탭값1] [스탭값2] [나머지4개바이트는 사용안함]
* (스탭모터) 총2048스탭.. 최소스탭이 32스탭
* 2048이 360도에 해당됨.. 32스탭이 5도정도 됨..
* 마스터에 2축 조이스틱이 장착되었다.
* x축을 A0포트에 y축을 A1포트에 연결해서 사용하자!
* x축을 움직이면 슬레이브1의 스탭모터가 제어되고
* y축을 움직이면 슬레이브2의 스탭모터가 제어된다.
CAN통신라이브러리(MCP2515)
github.com/autowp/arduino-mcp2515
레퍼런스코드(아두이노 #125)
'프로그래밍 > CAN통신(MCP2515)' 카테고리의 다른 글
| [아두이노#125] CAN통신모듈(MCP2515/5편) 1:N통신 기본코드 버전2 만들기(녹칸다/포로리야공대가자) (0) | 2020.10.28 |
|---|---|
| [아두이노#123] CAN통신모듈(MCP2515/4편) 1:N통신으로 온도센서와 먼지센서값 측정하기(녹칸다/포로리야공대가자) (0) | 2020.10.27 |
| [아두이노#117] CAN통신 MCP2515으로 1:N통신을 구현해보자(3편/기본)(녹칸다/포로리야공대가자) (0) | 2020.10.21 |
| [아두이노#113] CAN통신 MCP2515으로 1:N통신을 구현해보자(2편/프로토콜)(녹칸다/포로리야공대가자) (0) | 2020.10.19 |
| [아두이노#108] CAN통신 MCP2515으로 1:N통신을 구현해보자(튜토리얼)(녹칸다/포로리야공대가자) (0) | 2020.10.13 |













