반응형

(SG90 팬틸트 프레임/서보모터2개 심화과정)
조립&기본작동
시리얼 통신으로 제어
버튼으로 제어
조이스틱으로 제어
예제 24-1
* 바닥쪽에 있는 서보모터(D5)를 0~180~0도 회전시키고
* 이어서 위에있는 서보모터(D6)를 0~180~0도 회전시키는 것을 반복해라!

예제 24-2
* 시리얼 통신으로 2개의 각도값을 보내주면 그값으로
* 팬틸트 프레임(아래쪽D5, 위쪽D6)을 조절하라!
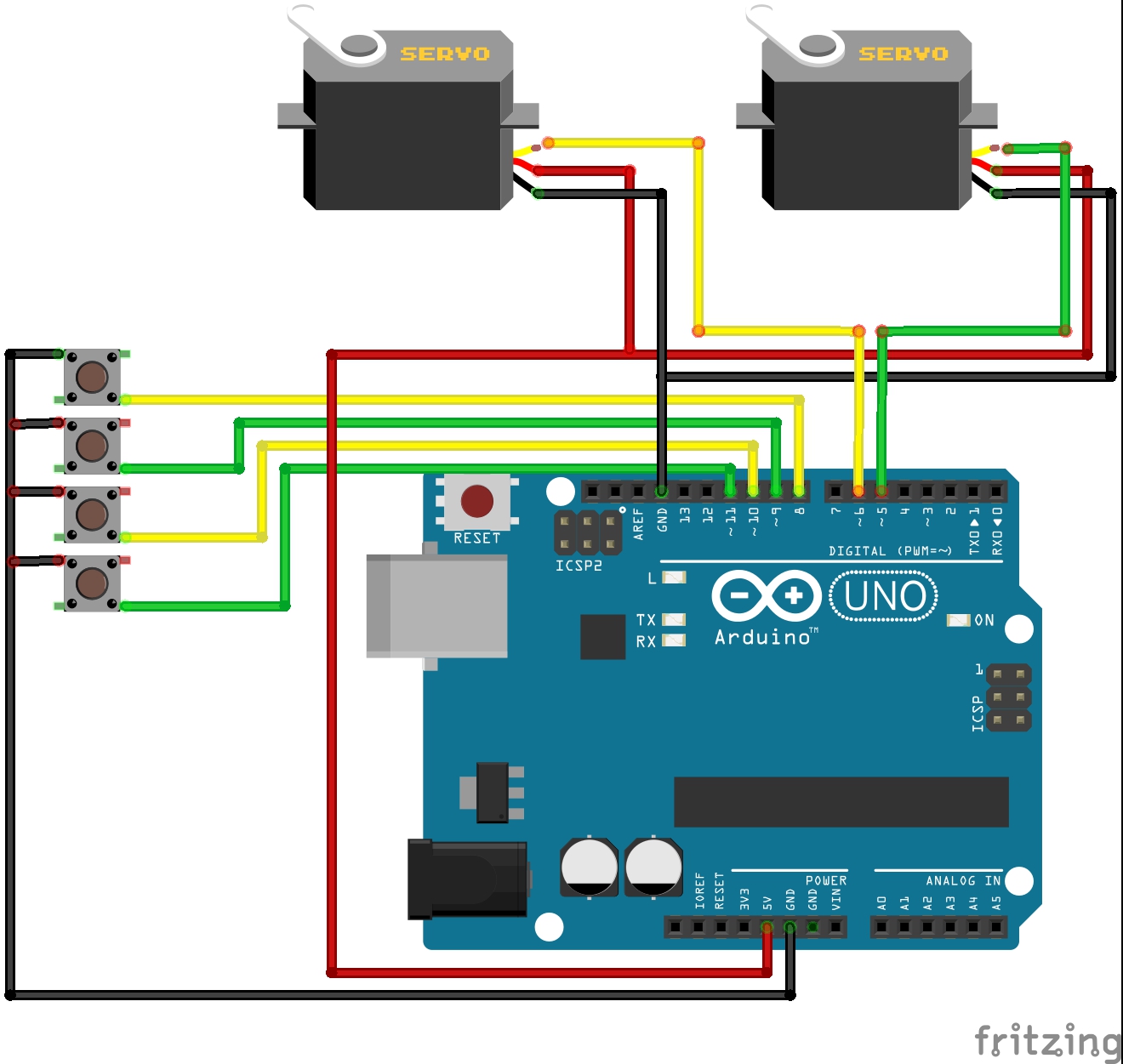
예제 24-3
* 버튼 4개(D8,D9,D10,D11)를 설치를해서 2개는 바닥쪽 서보모터(D5)를 제어하고
* 나머지2개는 위쪽 서보모터(D6)를 제어해라!
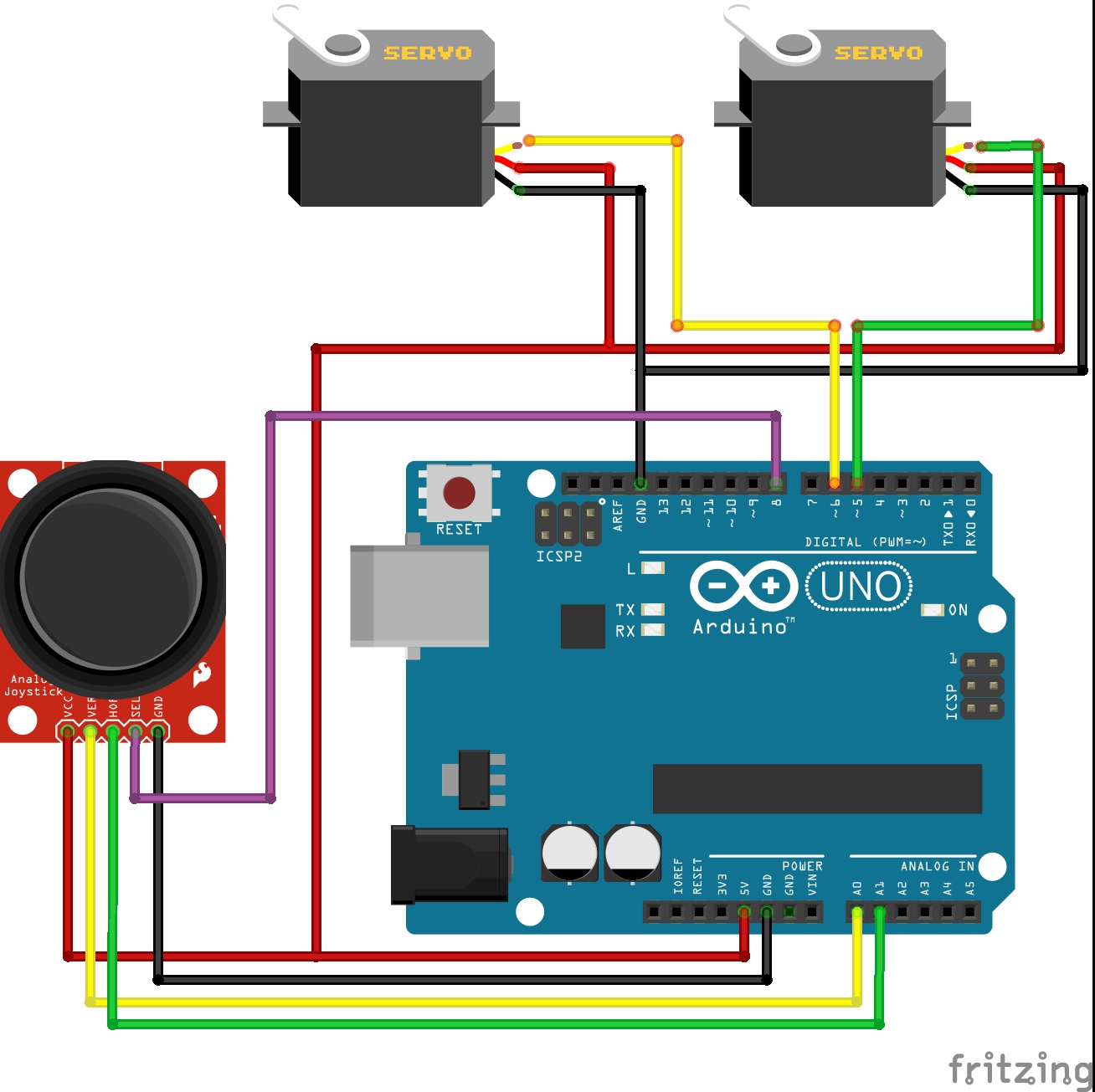
예제 24-4
* 조이스틱을 연결해서 x축(A0)은 아래축 서보모터(D5)를 움직이고
* y축(A1)은 위쪽 서보모터(D6)를 움직이게 하라!
* 버튼(D8)이 눌려지면 팬틸트가 0,0으로 이동한다.
반응형
'프로그래밍 > 아두이노 호작질' 카테고리의 다른 글
| [아두이노강의] 포로리야 공대가자 #26 포토인터럽트 (0) | 2020.05.07 |
|---|---|
| [아두이노강의] 포로리야 공대가자 #25 적외선근접센서 (0) | 2020.05.07 |
| [아두이노강의] 포로리야 공대가자 #23 FND디스플레이모듈(TM1637) (0) | 2020.04.30 |
| [아두이노강의] 포로리야 공대가자 #22 디지털충격센서(SW-420) (0) | 2020.04.29 |
| [아두이노강의] 포로리야 공대가자 #21 가변저항(포텐셔미터) (0) | 2020.04.29 |













