[unity#15] 유니티에 있는 로봇모양 FBX모델이 물건을 진공컵 그리퍼로 붙혀서 옮기려면 어떻게 할지 아두이노와 함께 알아보기! (녹칸다 디지털트윈/digitaltwin)

https://youtube.com/live/F-C1hUo3HFI
[unity#15] 유니티에 있는 로봇(robot)모양 FBX모델이 물건을 진공컵 그리퍼로 붙혀서 옮기려면 어떻게 할지 아두이노(arduino)와 함께 알아보기! (녹칸다 디지털트윈/digitaltwin)
녹칸다의 내맘대로 유니티(unity) 시리즈이다!
이번편의 내용은 아래 슬라이드로 공유된다!
https://docs.google.com/presentation/d/1yiia2U7D-iLx6HU1SVTbA4632Rpbq3rOaz8UXqatIcg/edit?slide=id.g34b8376e601_1_2#slide=id.g34b8376e601_1_2
로봇이 물건을 집도록 해보자2!
유니티15편의 전체 패키지
1.녹칸다의 4dof로봇팔 모델인 simple_robot.fbx를 유니티에 추가하고 물건을 부모-자식간의 관계를 이용해서 옮기는 것을 보이시오!

2.유니티의 힌지조인트, 스프링조인트, 픽스드조인트에 대해서 간단한 예시를 보이시오!
(스크립트 없는 예제)



3.예제1번에서 만들어놨던 로봇모양을 그대로 활용하고 대신 그리퍼에 물건을 부착하는 방식으로 fixed joint를 사용하는 것을 보이시오!(녹칸다 기준 이방법이 가장 확실한 방법임!)

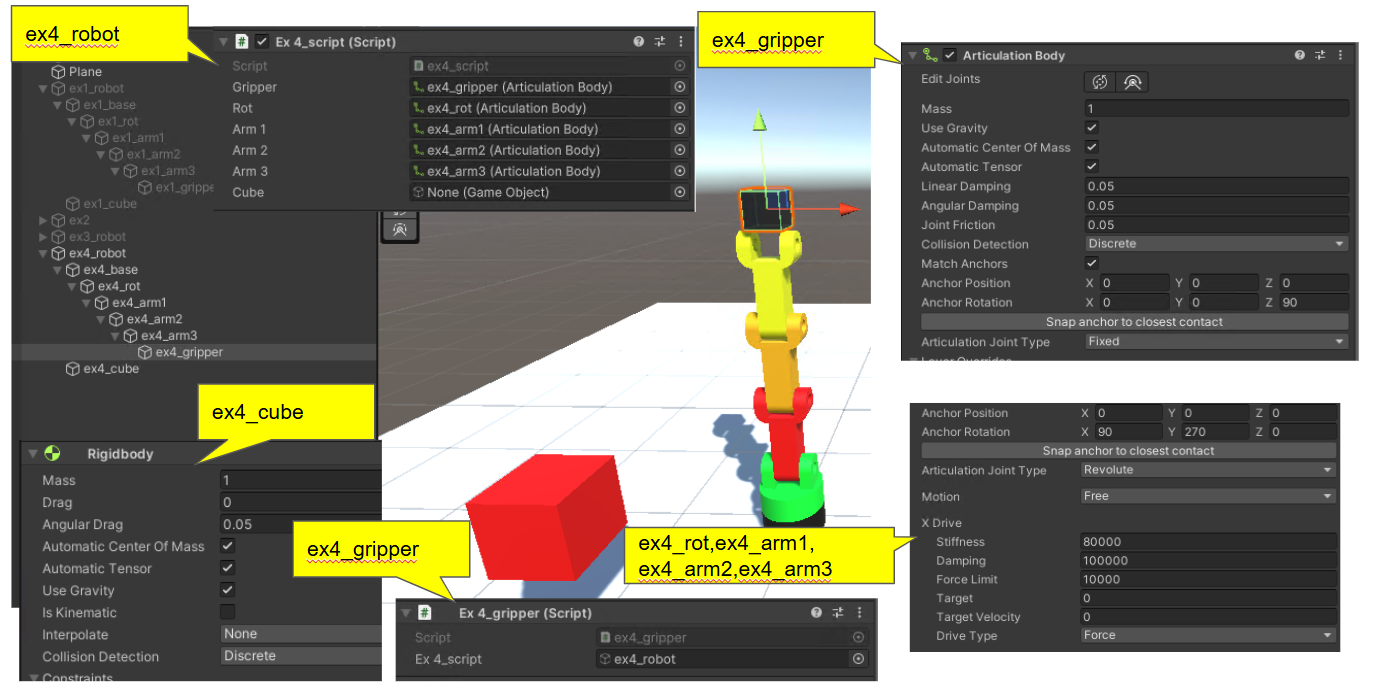
4.예제3번에서 로봇의 gripper부품이 물건하고 충돌이 났을 경우에만 fixed joint를 이용해서 옮길 수 있도록 하시오!
5.예제4번에서 아두이노 우노를 연결하고 아두이노의 디지털2번핀,3번핀 4번핀에 버튼을 1개씩 연결한다음 버튼을 누르면 지정되어있는 위치에 물건이 1개씩 생성되는데 가장 최근에 생성된 물건을 옮기도록 하시오!
