[아두이노#471] (ESPNOW#3) ESP8266보드의 액츄에이터를 ESPNOW로 단방향으로 제어하는 방법!(녹칸다/포로리야공대가자)

(ESPNOW#3) ESP8266보드의 액츄에이터를 ESPNOW로 단방향으로 제어하는 방법!
녹칸다의 ESPNOW 시리즈이다!
ESP보드는 제조사에서 제공하는 보드끼리 통신하는 프로토콜이 있다!
그것이 바로 ESPNOW이다!
ESP32나 ESP8266보드에 별도의 장치를 추가하지 않더라도 서로 통신이 가능하다!
1:1로 구성할수 있고 1:N으로 구성할수 있고 N:N으로 구성할 수 있고 단방향, 양방향 모두 가능한것 같다!
이번편은 ESP8266보드 2대를 준비해서 한쪽에는 모터류를 연결하고 다른쪽에는 제어할 수 있도록 ESPNOW로 구현해보도록 하자!
모터는 서보모터와 DC모터를 제어해보는 것으로 해보자!
1.서보모터 각도제어
2.DC모터 켜고 끄기
3.DC모터 속도제어
4.DC모터 방향제어
제어하는쪽 보드에 가변저항이나 버튼을 이용해서 원격제어해보도록 하자!
(실제로한거)
1.ESPNOW 슬레이브에 서보모터를 연결하고 컨트롤러에서 유저에게 각도값을 시리얼입력으로 받아서 서보모터를 제어하시오!

2.컨트롤러에 버튼 2개를 연결해서 슬레이브에 있는 서보모터의 각도를 증감시키시오!

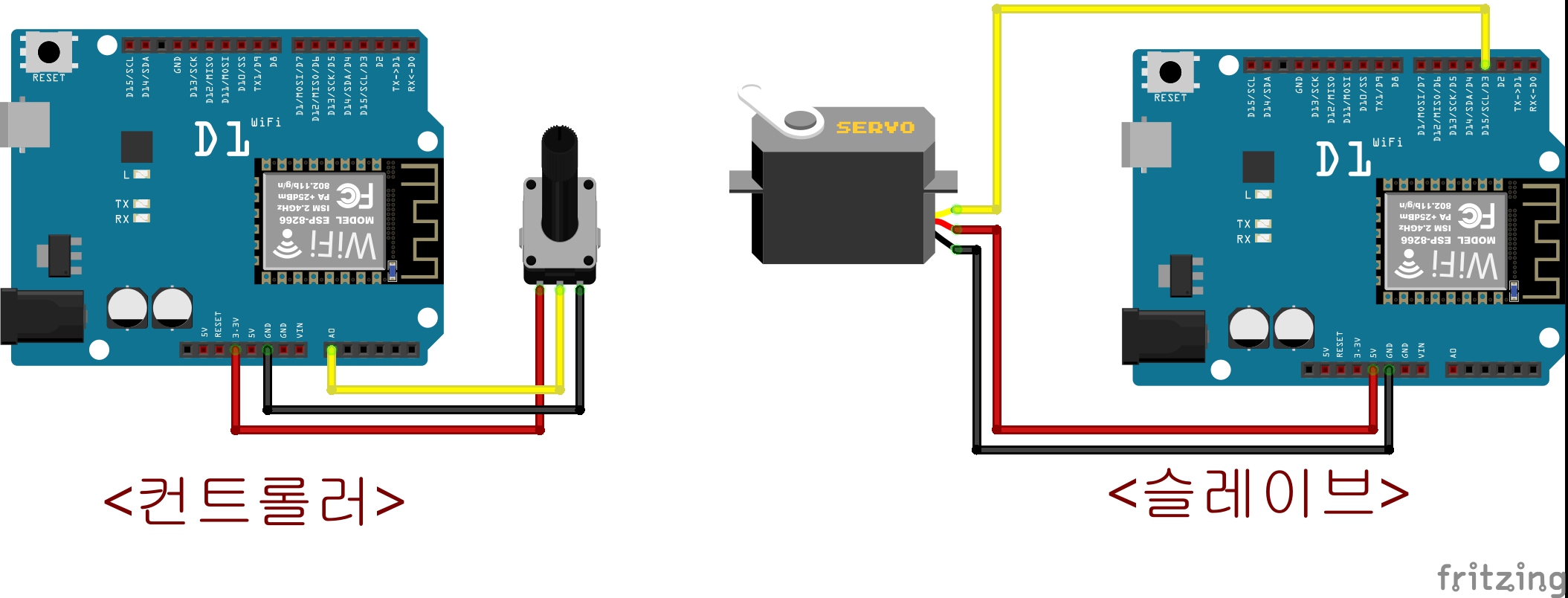
3.컨트롤러에 가변저항을 연결해서 서보모터의 각도를 제어하시오!
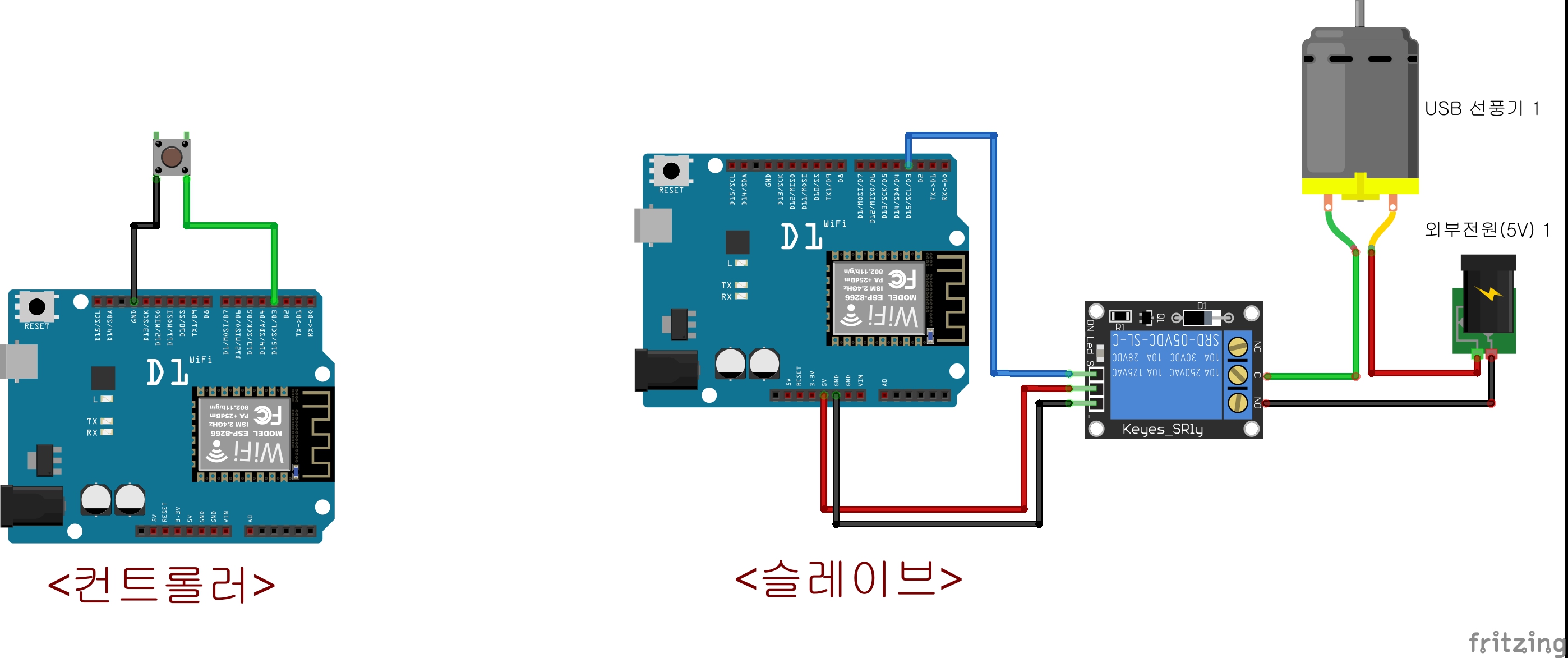
4.슬레이브에 릴레이로 DC모터를 연결하고 컨트롤러에 버튼 1개를 연결해서 버튼을 누르는동안에 모터가 켜지도록 하시오!
5.(4)예제에서 컨트롤러에서 일정시간 신호가 오지 않는다면 OFF인걸로 간주한다
6.버튼2개를 컨트롤러에 연결해서 ON/OFF하시오!

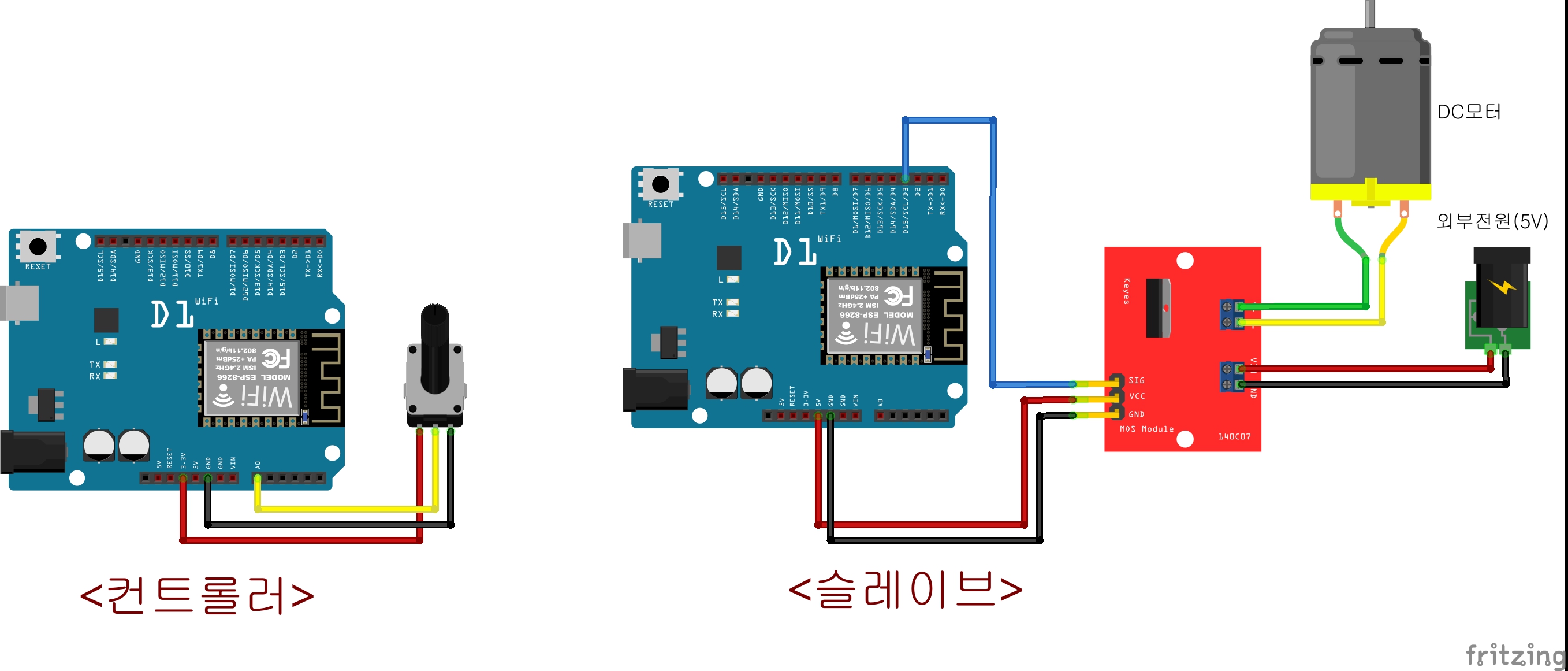
7.슬레이브에 IRF520으로 DC모터를 연결하고 컨트롤러에 버튼 2개를 이용해서 속도를 증감시키시오!
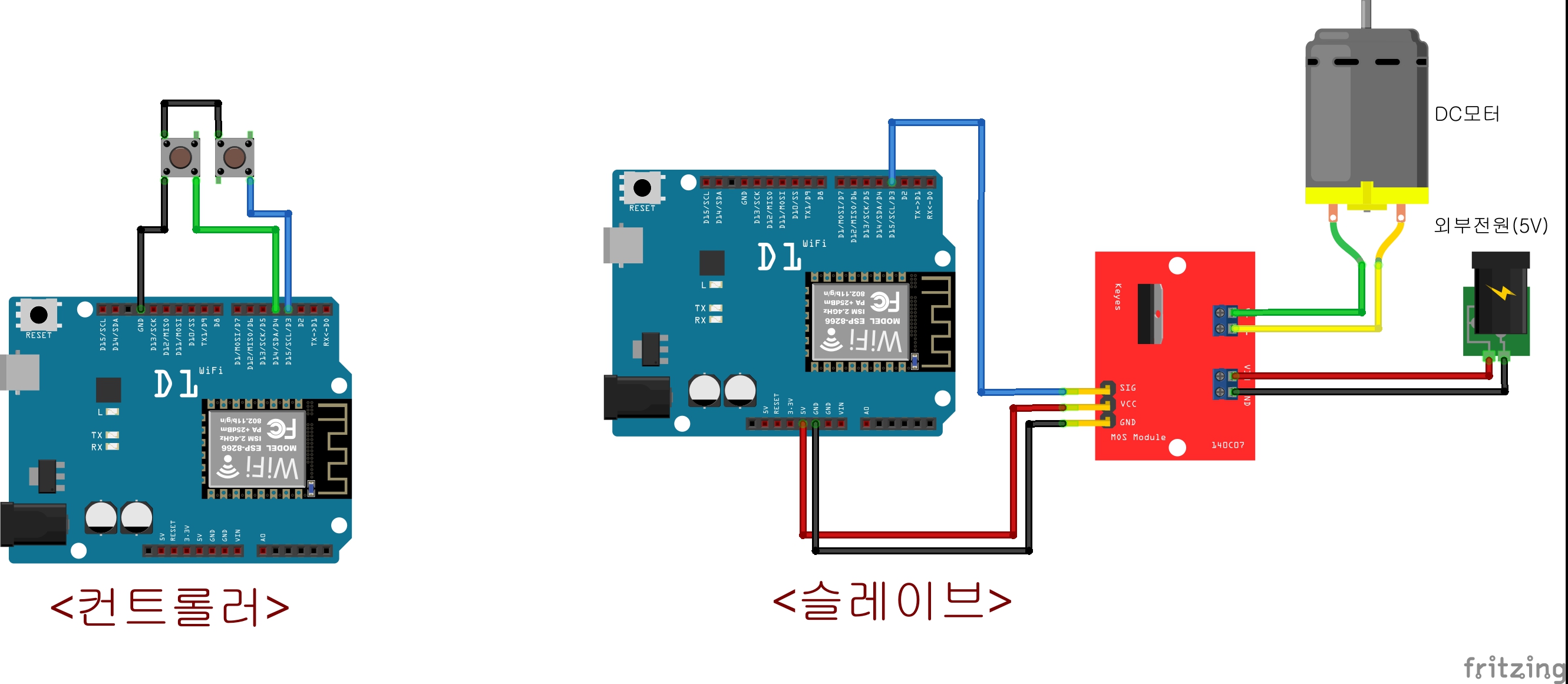
8.(7)예제에서 컨트롤러에 가변저항을 연결해서 속도제어르를 하시오!
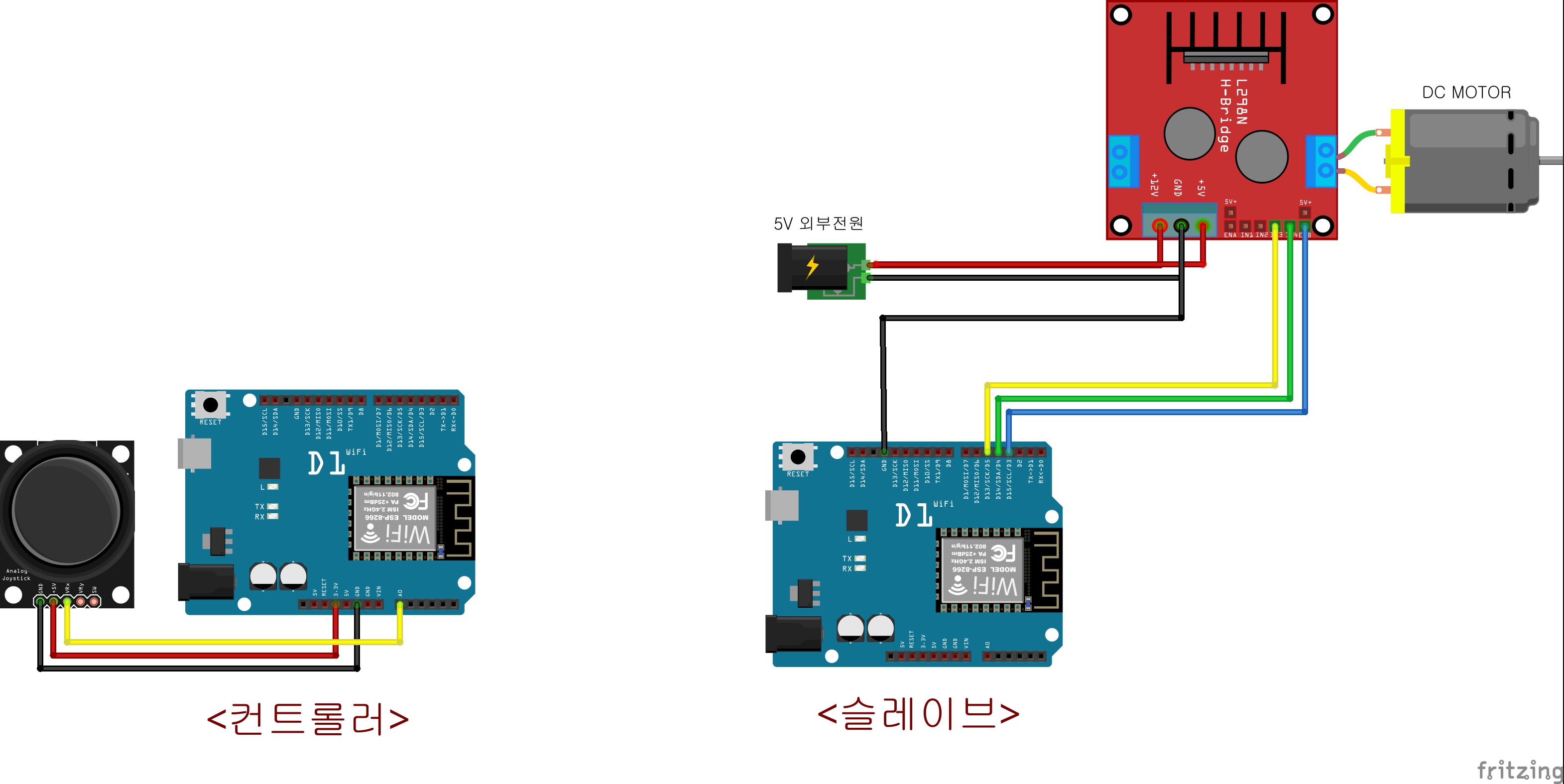
9.슬레이브에 모터드라이버(L298N)를 연결하고 컨트롤러에 조이스틱을 연결해서 DC모터를 정회전 역회전 속도제어 해보시오!