[아두이노#408] (Websocket#4) 웹서버에 달린 서보모터와 스탭모터를 인터렉티브하게 제어해보기!(녹칸다/포로리야공대가자)

(Websocket#4) 웹서버에 달린 서보모터와 스탭모터를 인터렉티브하게 제어해보기!
녹칸다의 웹소켓(websocket)을 이용해서 ESP8266을 웹서버로 구동시키는 시리즈이다!
기존 ESP8266으로 구현할 수 있는 웹서버를 동적으로 구현할 수 있는 예제이다!
웹서버와 웹클라이언트 방식에서 클라이언트가 서버에게 요청한다음 응답을 받는 구조를 가진다!
그러나 서버가 주도적으로 클라이언트에게 데이터를 전송할 수 없다!
웹소켓을 이용한 웹서버는 기존 웹서버와 동일한 방식으로 동작하나 클라이언트가 받게될 응답데이터에 자바스크립트로 구현된 웹소켓 코드가 내장되어있다!
웹서버는 내부적으로 별도의 포트를 이용해서 클라이언트에 설치된 웹소켓과 소켓통신을 함으로써 양방향 통신이 가능해진다!
(웹서버와 웹소켓 2개의 통신이 동시에 이루어진다)
이번편에서는 ESP8266에 서보모터와 스탭모터를 순서대로 연결하고 클라이언트에서 전송한 값으로 아~~주 빠른 반응속도로 웹소켓을 이용한 제어를 해보도록 한다!(아마 잘 될 것 같은데 해봐야 알 것 같음)
아래와 같은 목차로 진행해보도록 하자!
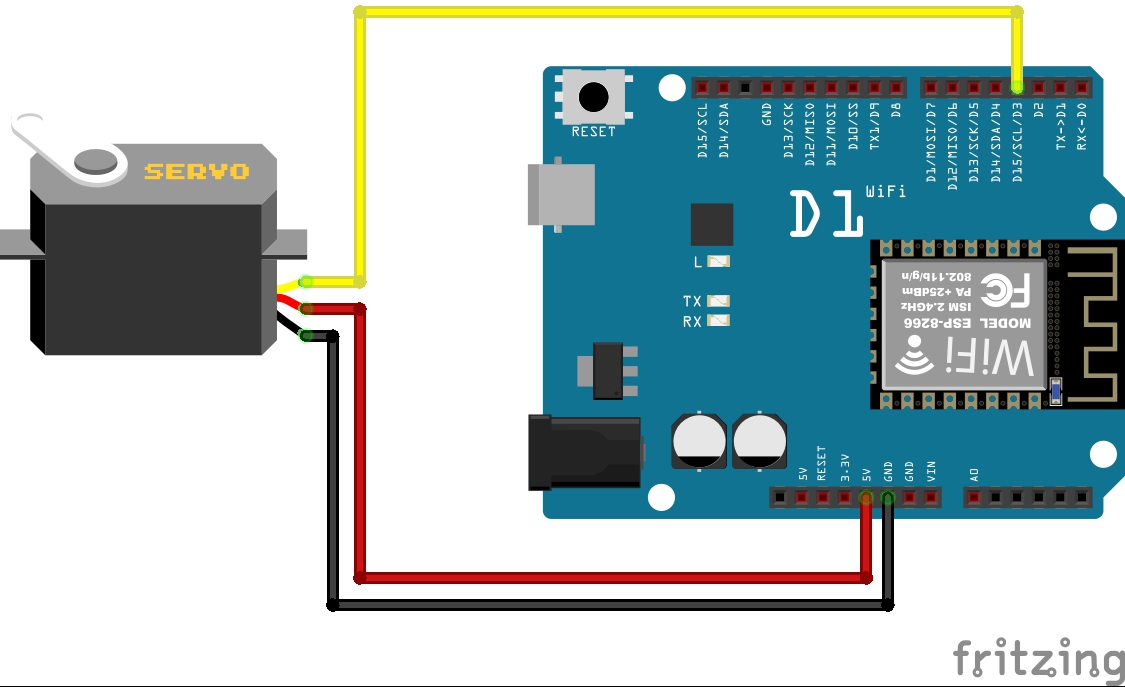
1.ESP8266에 서보모터를 연결하고 웹브라우저의 버튼을 이용해서 제어해보기!(현재각도 반환)
2.(1)예제에 range콤포넌트를 이용해서 실시간 각도 제어해보기!
3.ESP8266에 스탭모터를 연결하고 웹브라우저의 버튼을 이용해서 제어해보기!(현재각도 반환)
4.(3)예제에 range콤포넌트를 이용해서 실시간 각도 제어해보기!
5.유저에게 원하는 각도값을 입력받아서 이동하도록하고 이동이 시작된 시점과 완료된 시점을 피드백하시오!(스탭모터가 움직이는데 걸리는 시간이 있음!)
(실제로한거)
1.버튼2개를 이용해서 서보모터의 각도를 올리거나 내릴수 있도록 하시오!
2.range컴포넌트를 이용해서 서보모터의 각도를 제어하시오!
3.스탭모터를연결해서 버튼2개를 이용해서 스탭을 증가시키거나 감소시켜보시오!

4.range컴포넌트를 이용해서 스탭모터의 각도를 제어하시오!(-720 ~ +720)
관련라이브러리(websocket)
https://github.com/Links2004/arduinoWebSockets
ESP8266에서 스탭모터돌리기(#145)
https://bota.tistory.com/1380